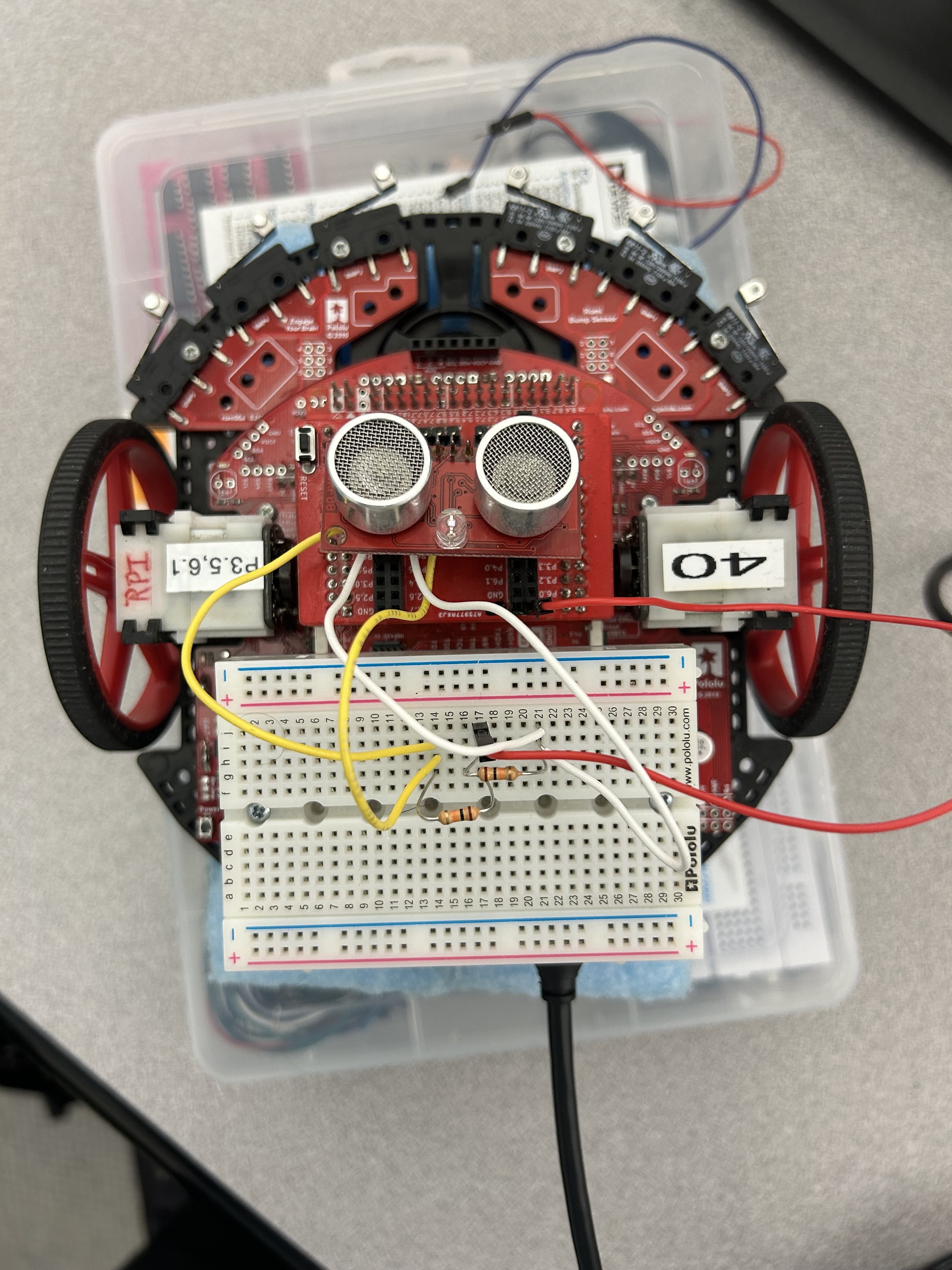
Microcontroller & Peripherals
- TI MSP430 (GPIO, timers, ISRs)
- PWM motor control
Embedded System for Autonomous Obstacle Navigation
This project was a joint effort with me and Eric Lin.
Jump to DemoThe Robotics Car Guidance System was designed to autonomously navigate a barrier-filled track. Using a ranger sensor to detect distances and wheel encoders for turning precision, the car decides whether to move straight, turn clockwise, or counterclockwise. PWM motor control and H-Bridge drivers provide smooth and precise actuation.
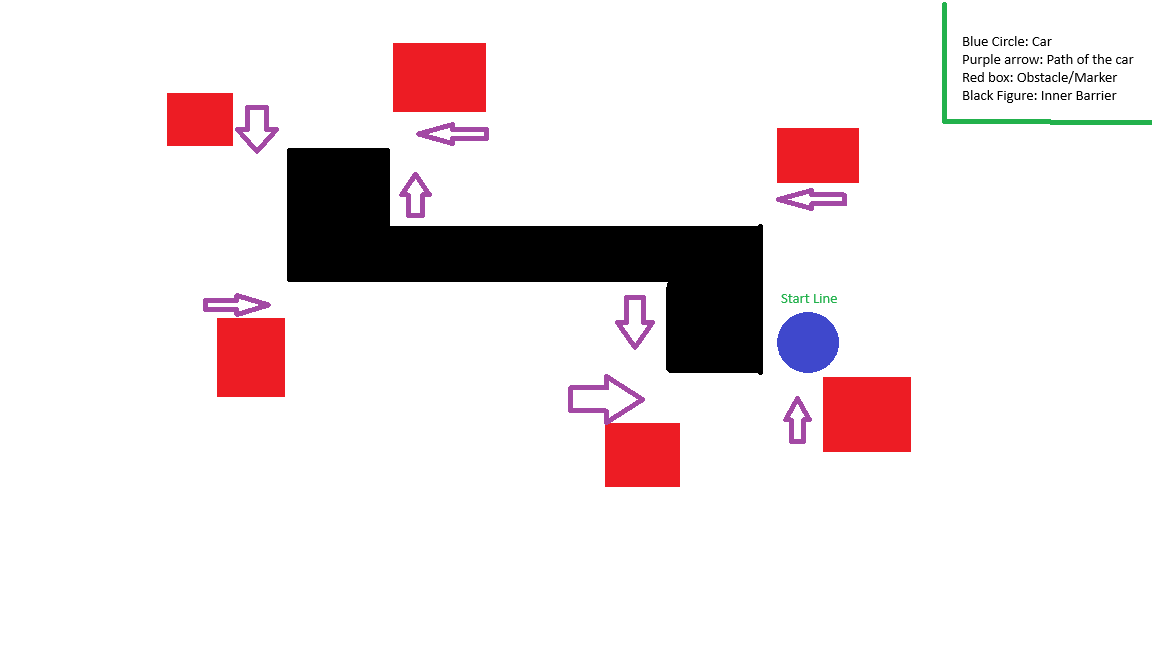
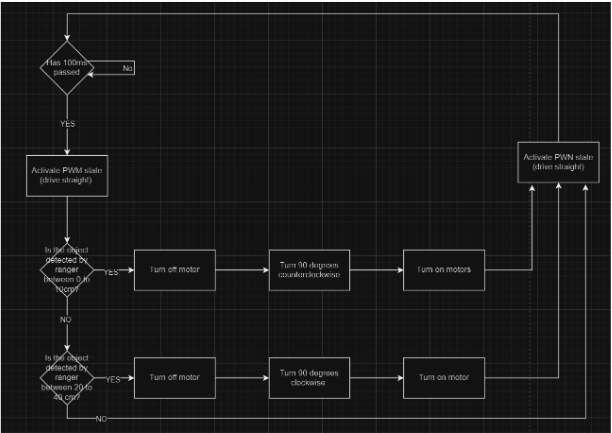
Wheel encoders compute the arc length for 90° turns. H-Bridge GPIOs switch motor direction, and motors are disabled mid-turn for precision.
Wheel speed regulated using PWM capture mode. Desired speed is constant, with error correction applied. Min/max duty cycles enforced for stability.
Full documentation, schematics, and experimental data are available in the project report.